ROS Topic Subscriber
Follow along: ROS Topic Subscriber Example
The program launching process along with parameter settings are all simplified and set up on the Jupyter Notebook Environment.
- Open the 01_02_ros_topic_subscriber.ipynb Jupyter Notebook
- Import the necessary python libraries and modules
- Follow and Execute the example codes
(The Jetson Board used for these examples are => Jetson Nano)
Open the following jupyter notebook:
03_02_ros_topic_subscriber.ipynb
To run the cells within the notebook use Ctrl + Enter
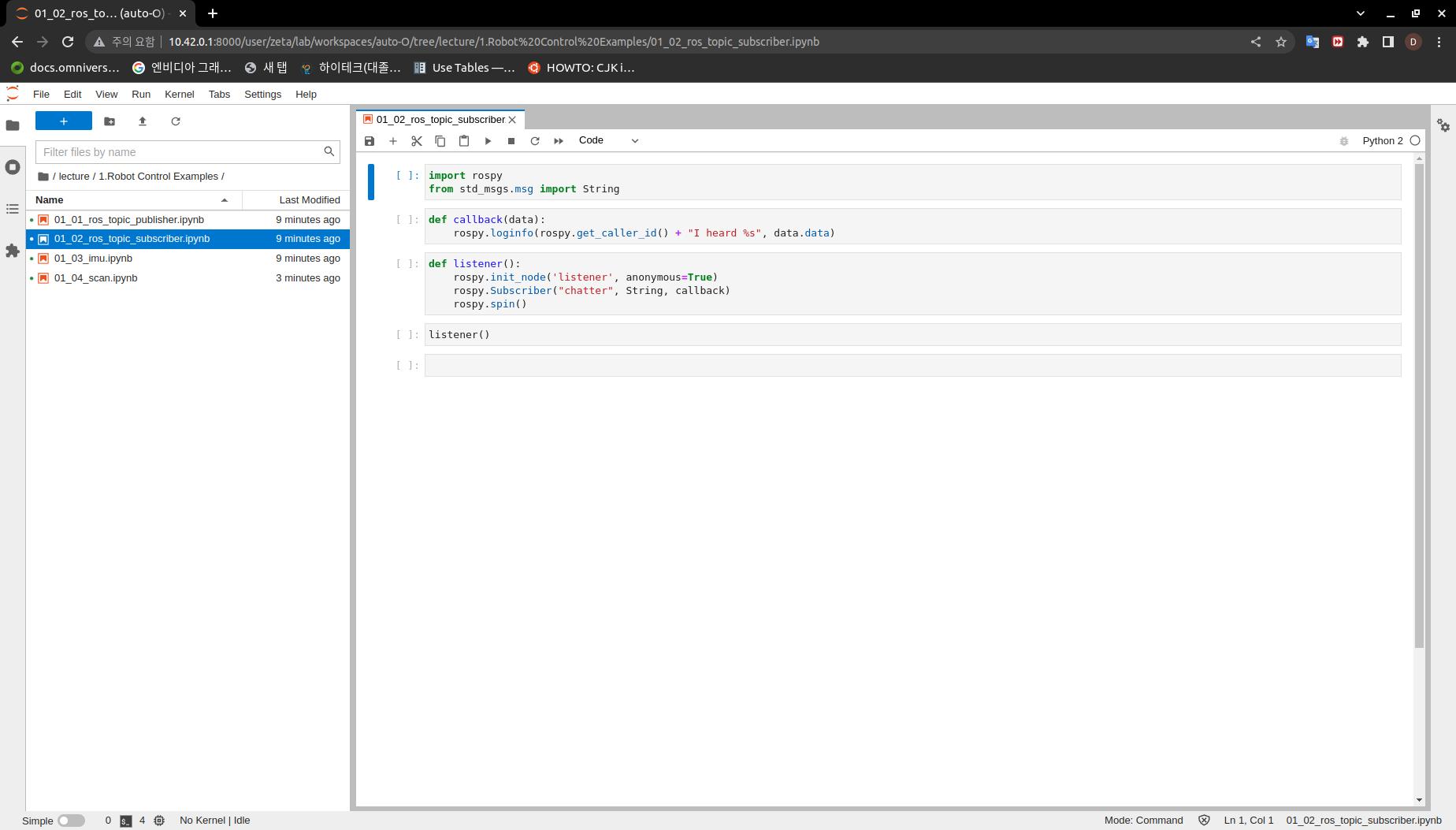
Import the necessary python libraries and modules
import rospy
from std_msgs.msg import String
Create callback() function
Within the callback function:
Node id and message data output
def callback(data):
rospy.loginfo(rospy.get_caller_id() + "I heard %s", data.data)
Create listener() function
Within the listener function:
Create listener Node
Subscribe to Chatter Topic Message
Handle Subscriber Callback
def listener():
rospy.init_node('listener', anonymous=True)
rospy.Subscriber("chatter", String, callback)
rospy.spin()
Execute the listener() function with handler functions.
listener()