Automatic Charging
Description of components and algorithms required for automatic charging
Component

Consisting of robot and station
A system that is charged by combining the charging terminal and the docking part of the station
IR Camera : Used to detect IR patterns of stations
Sonar Sensor : Adjust the balance so that it goes in a straight line when charging.

Process
Move to specified charging coordinates
Rotate to check station position
Move the robot so that the station is located in the exact center of the robot.
After confirming that it is located in the center, perform the docking process.
After the station’s charging LED lights up, the color of the robot LED bar changes to match the robot battery status.
Algorithm
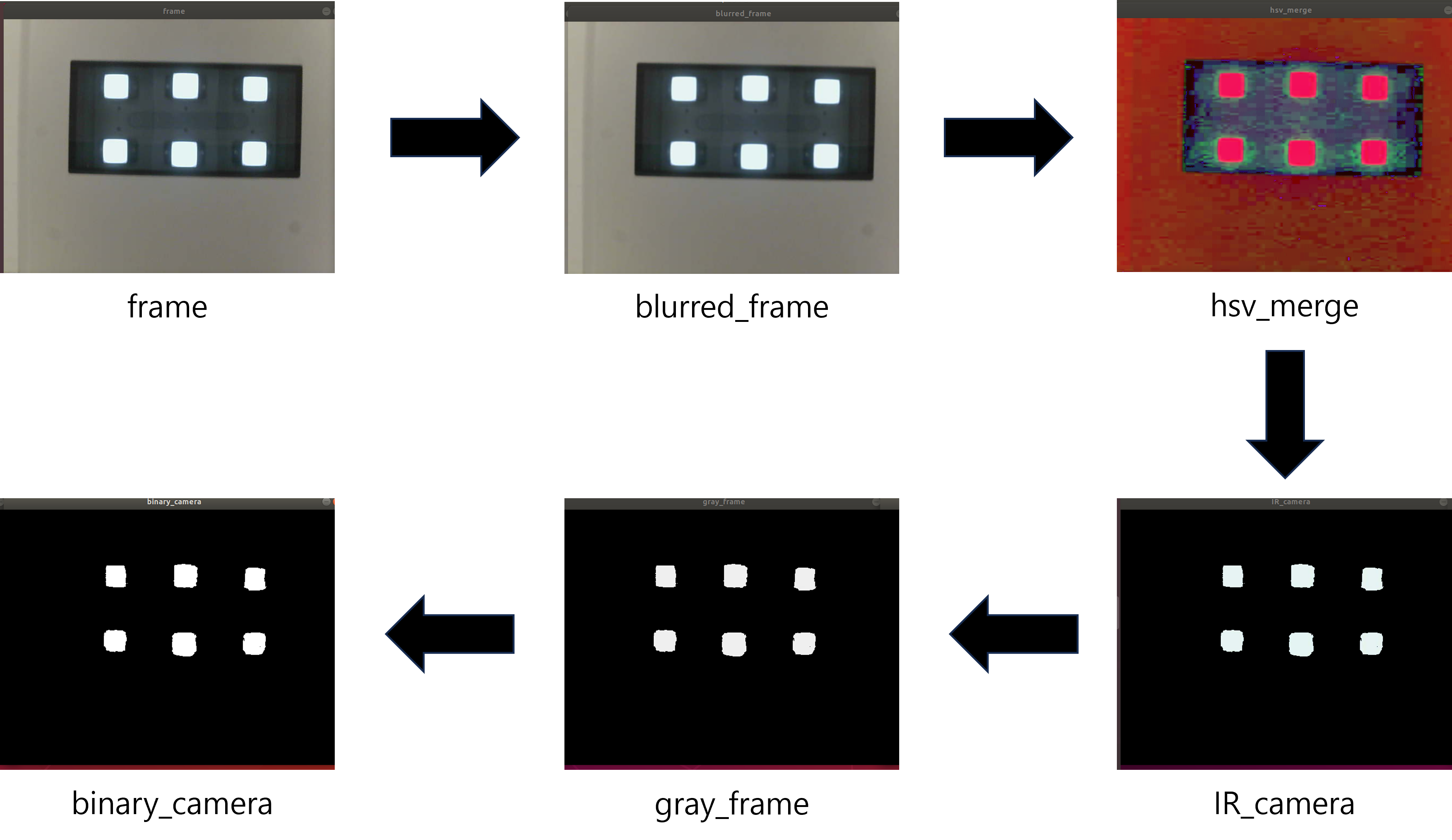
frame : Default image
blurred_frame : Removes noise and makes it smooth
hsv_merge : Change color, saturation, and value(brightness)
IR_camera : IR signal filtering
gray_frame : Convert to eliminate noise, speed up computational processing, and improve accuracy
binary_camera : Extract image features by converting pixel values around each pixel to binary numbers
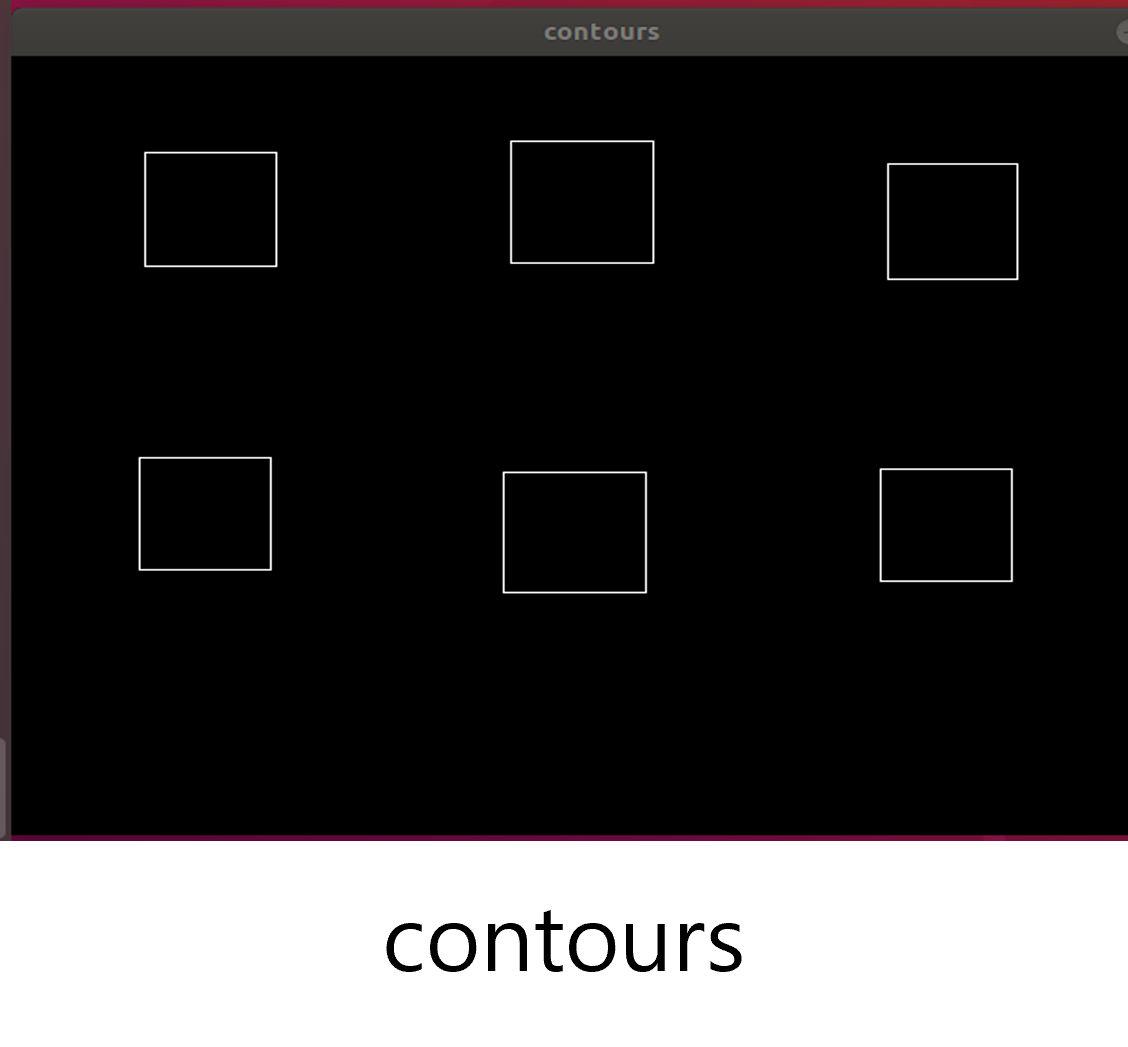
contours : Drawing the outline of an image
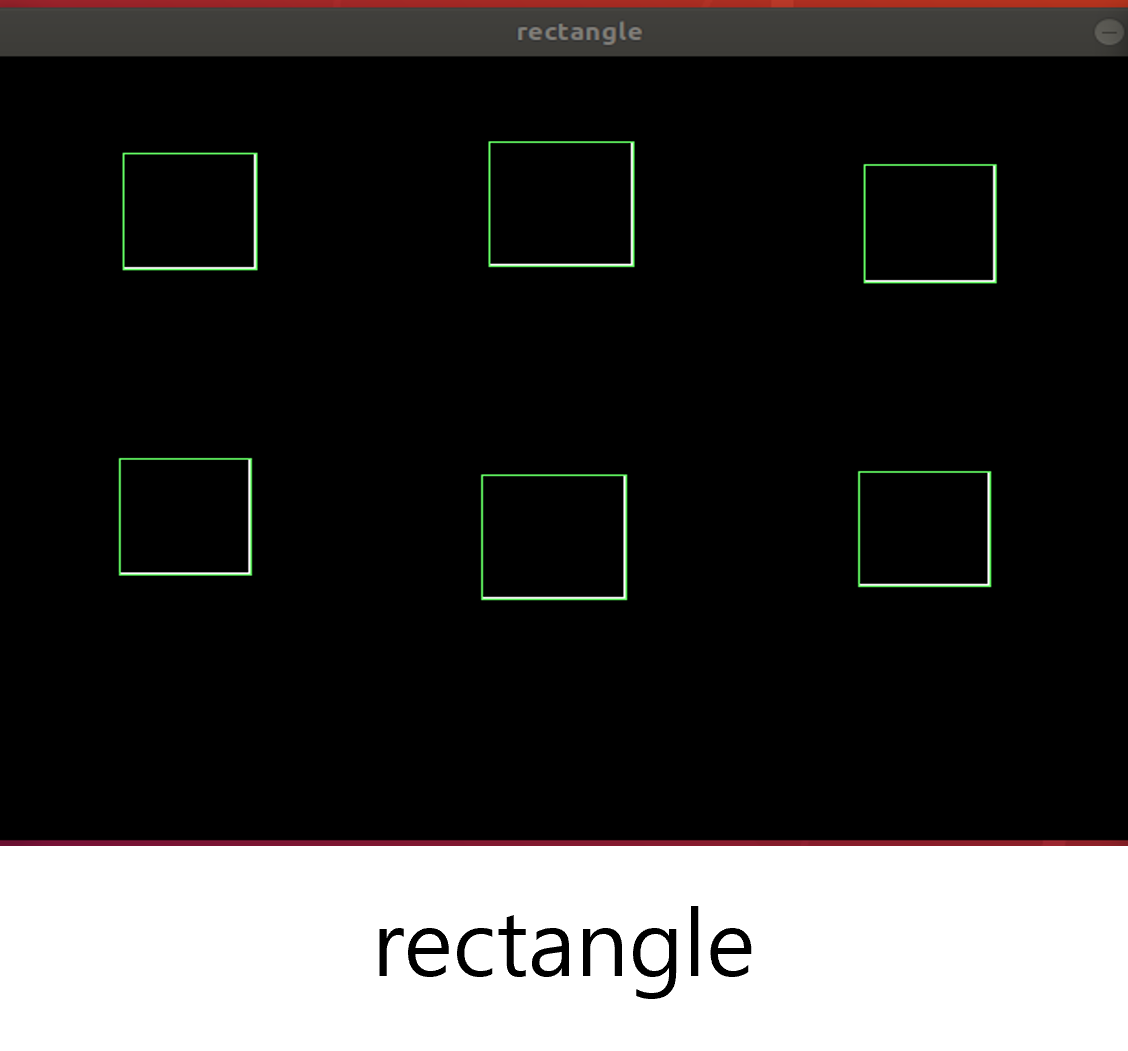
rectangle : Select only the outline of a rectangular shape
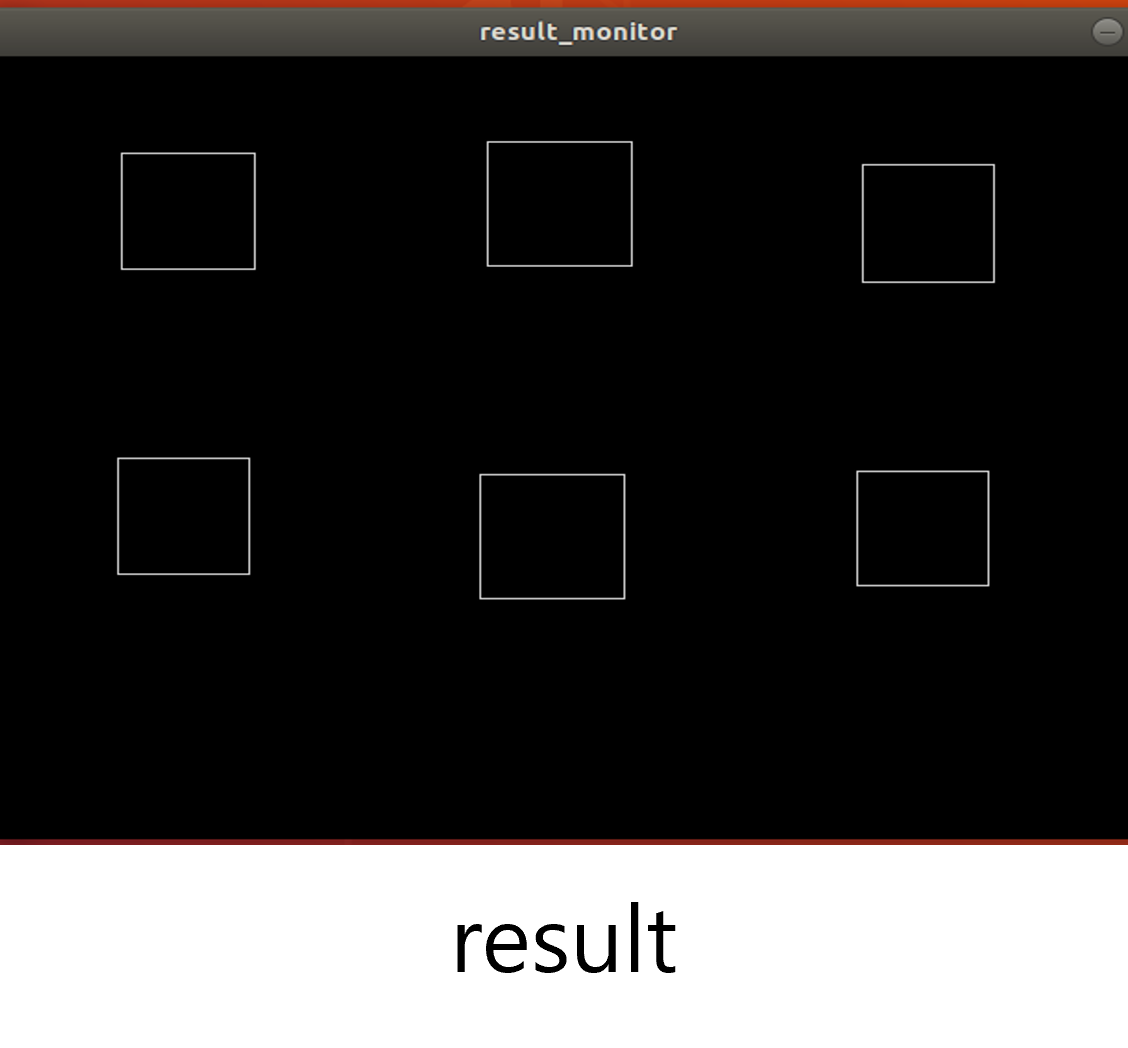
result : Output the resulting image after all processes
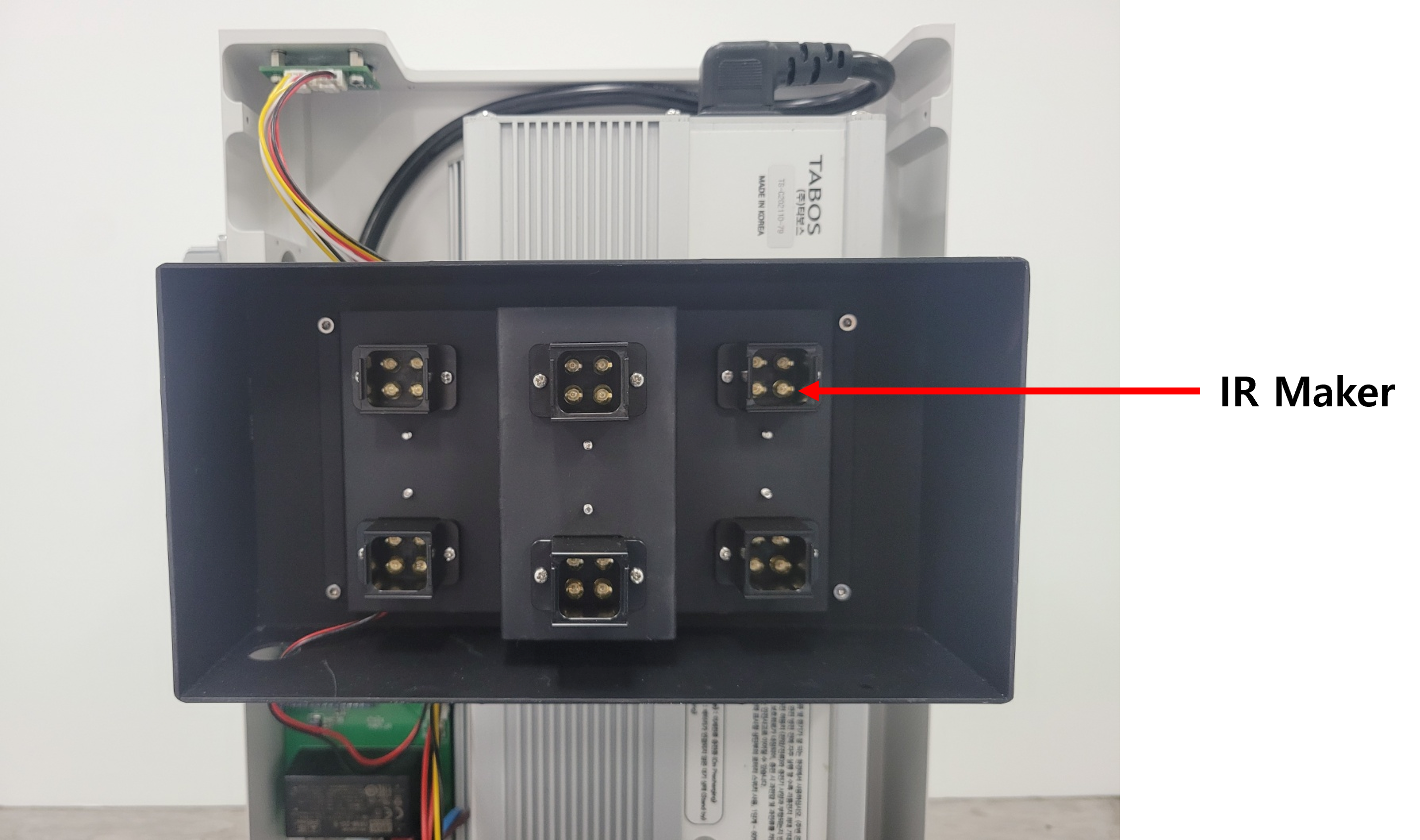
The robot installation environment changes frequently.
Automatic charging requires a singularity that can detect the station without being affected by the environment.
Create 6 rectangular patterns to create a singularity.